Section: New Results
Physical modelling and simulation
Real-time mechanical simulation of brittle fracture
Participants : Loeïz Glondu, Georges Dumont [contact] , Maud Marchal [contact] .
Simulating brittle fracture of stiff bodies is now commonplace in computer graphics. However, simulating the deformations undergone by the bodies in a realistic way remains computationaly expensive. Thus, physically-based simulation of brittle fracture in real-time is still challenging for interactive applications. We have worked on a physically-based approach for simulating realistic brittle fracture in real-time.Our method is mainly composed of two parts: (1) a fracture initiation method based on modal analysis, (2) a fast energy-based fracture propagation algorithm. Results that emphasize the "real-time" part of this method have been published in [9] . Collision detection plays a key role in simulation performance. This is particularly true for fracture simulation, where multiple new objects are dynamically created. We proposed algorithms and data structures for collision detection in real-time brittle fracture simulations. We build on a combination of well-known efficient data structures, namely distance fields and sphere trees, making our algorithm easy to integrate on existing simulation engines. We proposed novel methods to construct these data structures, such that they can be efficiently updated upon fracture events and integrated in a simple yet effective self-adapting contact selection algorithm. Altogether, we drastically reduce the cost of both collision detection and collision response. We have evaluated our global solution for collision detection on challenging scenarios, achieving high frame rates suited for hard real-time applications such as video games or haptics [23] . Moreover, a common weathering effect is the appearance of cracks due to material fractures. We introduced a method to exemplar-based modeling that creates weathered patterns on synthetic objects by matching the statistics of fracture patterns in a photograph. A user study was proposed to determine which statistics are correlated to visual similarity and how they are perceived by the user. A revised physically-based fracture model capable of producing a wide range of crack patterns at interactive rates has been proposed whose parameter can be determined by a Bayesian optimization to produce a pattern with the same key statistics as an exemplar [10] . This work was the subject of the PhD thesis of Loeïz Glondu that has been successfuly defensed [3] .
Collision detection in large scale environments with High Performance Computing
Participants : Bruno Arnaldi, Quentin Avril, Valérie Gouranton [contact] .
We propose [14] a novel and efficient GPU-based parallel algorithm to cull non-colliding objects pairs in very large scale dynamic simulations. It allows to cull objects in less than 25ms with more than 100K objects. It is designed for many-core GPU and fully exploits multi-threaded capabilities and data-parallelism. In order to take advantage of the high number of cores, a new mapping function is defined that enables GPU threads to determine the objects pair to compute without any global memory access. These new optimized GPU kernel functions use the thread indexes and turn them into a unique pair of objects to test. A square root approximation technique is used based on Newton's estimation, enabling the threads to only perform a few atomic operations to cull non-colliding objects. We present a first characterization of the approximation errors that enables the fixing of incorrect computations. Input and output GPU streams are optimized using binary masks. The implementation and evaluation is made on large-scale dynamic rigid body simulations. The increase in speed is highlighted over other recently proposed CPU and GPU-based techniques. The comparison shows that our system is, in most cases, faster than previous approaches.
Simulation evaluations for ergonomics in VR
Participants : Georges Dumont [contact] , Charles Pontonnier.
The use of virtual reality tools for ergonomics applications is a very important challenge.
In order to improve the design of workstations, an estimation of the muscle forces involved in the work tasks has to be done.
For example, one of our study assessed the level of confidence for results obtained with an inverse dynamics method from real captured work tasks. The chosen tasks are meat cutting tasks, well known to be highly correlated to musculoskeletal troubles appearance in the slaughter industry.
The experimental protocol consists in recording three main data during meat cutting tasks, and analyze their variation when some of the workstation design parameters are changing.
External (cutting)force data : for this purpose, a 3D instrumented knife has been designed in order to record the force applied by the subject during the task;
Motion Capture data : for this purpose, we use a motion capture system with active markers (Visualeyez II, Phoenix Technologies, Canada);
EMG data : several muscle activities are recorded using electromyographic electrodes, in order to compare these activities to the ones obtained from the inverse dynamics method.
With regard to the design parameters, that are the table height and the cutting direction, trends of recorded muscles activations were defined in order to be compared to computed ones issued from a musculoskeletal simulation performed with the AnyBody modeling system (AnyBody, Aalborg, Denmark). Results showed that an optimal set of design parameters can be obtained [27] , whereas motor control strategies are highly dependent to the subject's experience and morphology.
This work has been done in collaboration with the Center for Sensory-motor Interaction (SMI, Aalborg University, Aalborg, Denmark), particularly Mark de Zee (Associate Professor) and Pascal Madeleine (Professor).
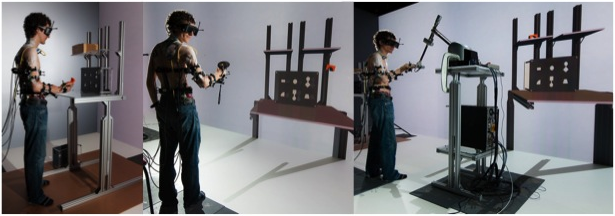
Furthermore, the fidelity of the VR simulator has to be evaluated (see Figure 2 ). For example, a simulator for assembly task has been evaluated in comparing different types of interaction : real, virtual and virtual + force feedback [28] . Objective and subjective metrics of discomfort led to highlight the influence of the environment on motor control and sensory feedback, changing more or less deeply the way the task is performed. Those change have to be taken into account to enable the use of such simulators for ergonomics purposes.